
1、说在前面
点击查看视频演示在宿舍条件有限制,不能更改门的锁体,不能破坏门的结构。
需要在门外安装指纹识别模块(需要有门缝走线),门把手适当位置安装固定舵机。
通过识别指纹开发板控制舵机硬拉门把手达到开门的目的。
需要购买的材料价格大概在100元左右。(22年12月价格)
2、准备材料
我使用的材料是:
1个充电宝(需要2个充电孔5V供电,也可使用充电器供电)
1卷电工胶布(包裹和固定电线,非必要)
1根USB线(给大力舵机独立供电)
1块UNO R3开发板(带打印线)
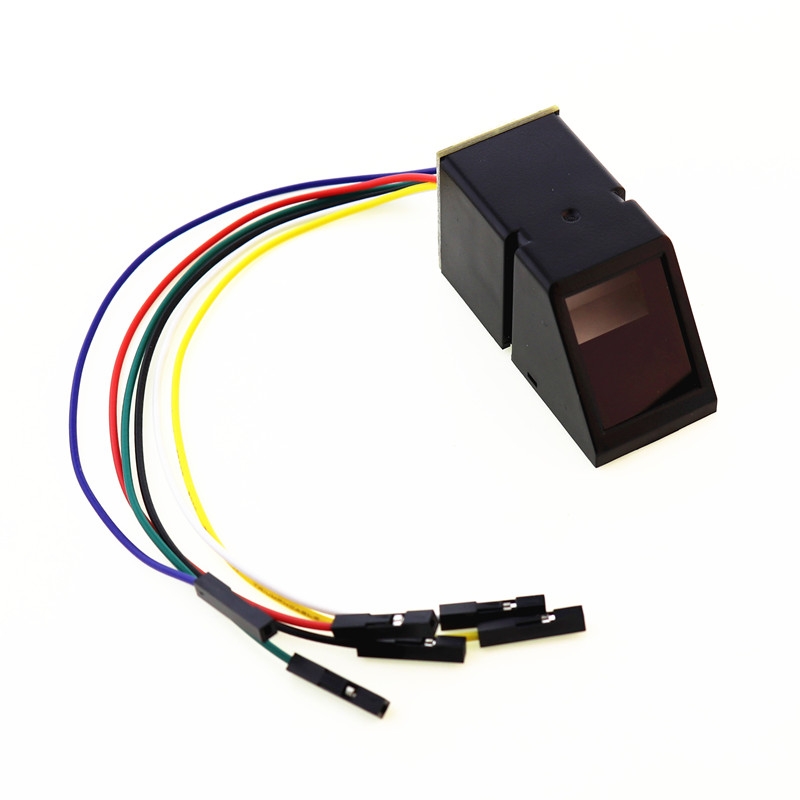
1个AS608指纹识别模块(带USB转TTL板)
1个MG996舵机180度(根据开门力度选择合适的舵机)(大力舵机需要独立供电)
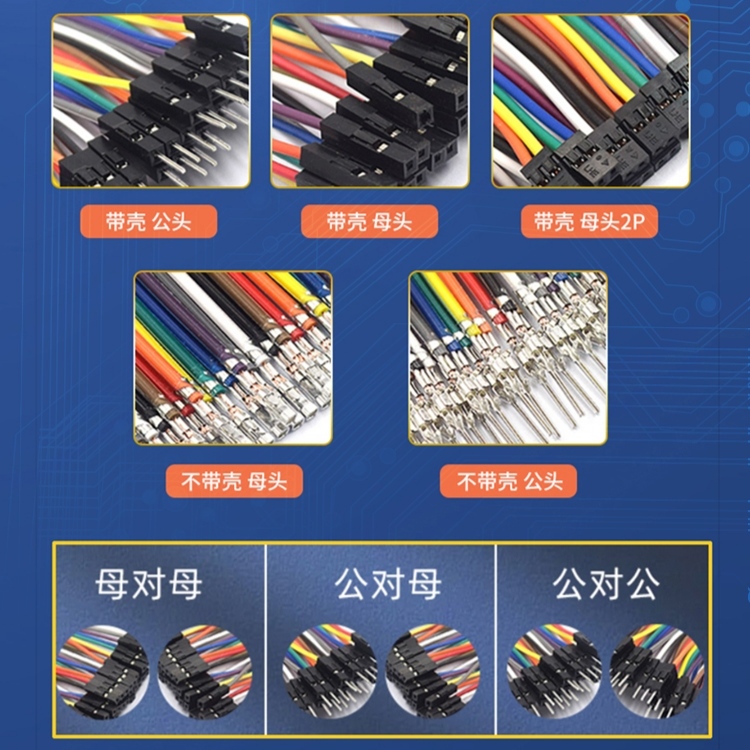
若干根合适长度的杜邦线(公对公、母对母、公对母)



3、指纹调试
使用USB转TTL板连接指纹模块和电脑。

1、Vi模块电源正输入端——TTL板3.3V(红)
2、Tx串行数据输出——TTL板Rx(黄)
3、Rx串行数据输入——TTL板Tx(白)
4、GND信号地——TTL板GND(黑)
(接线图如下)
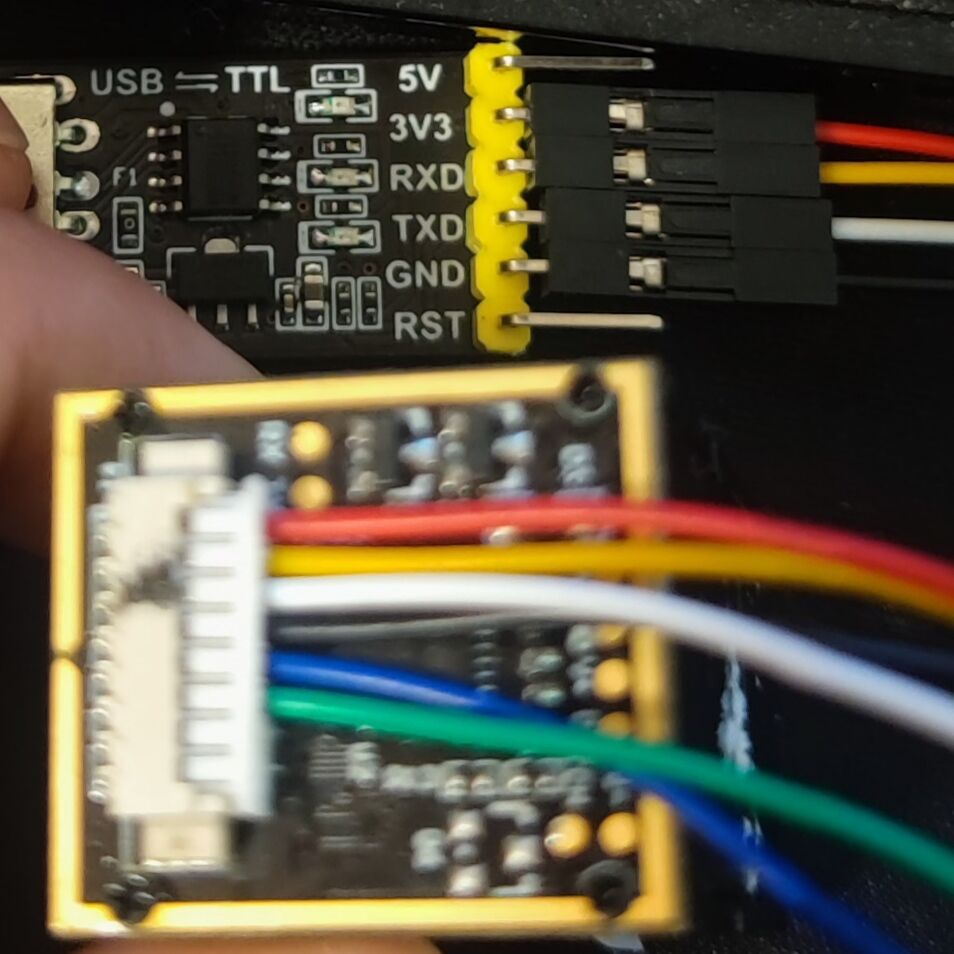
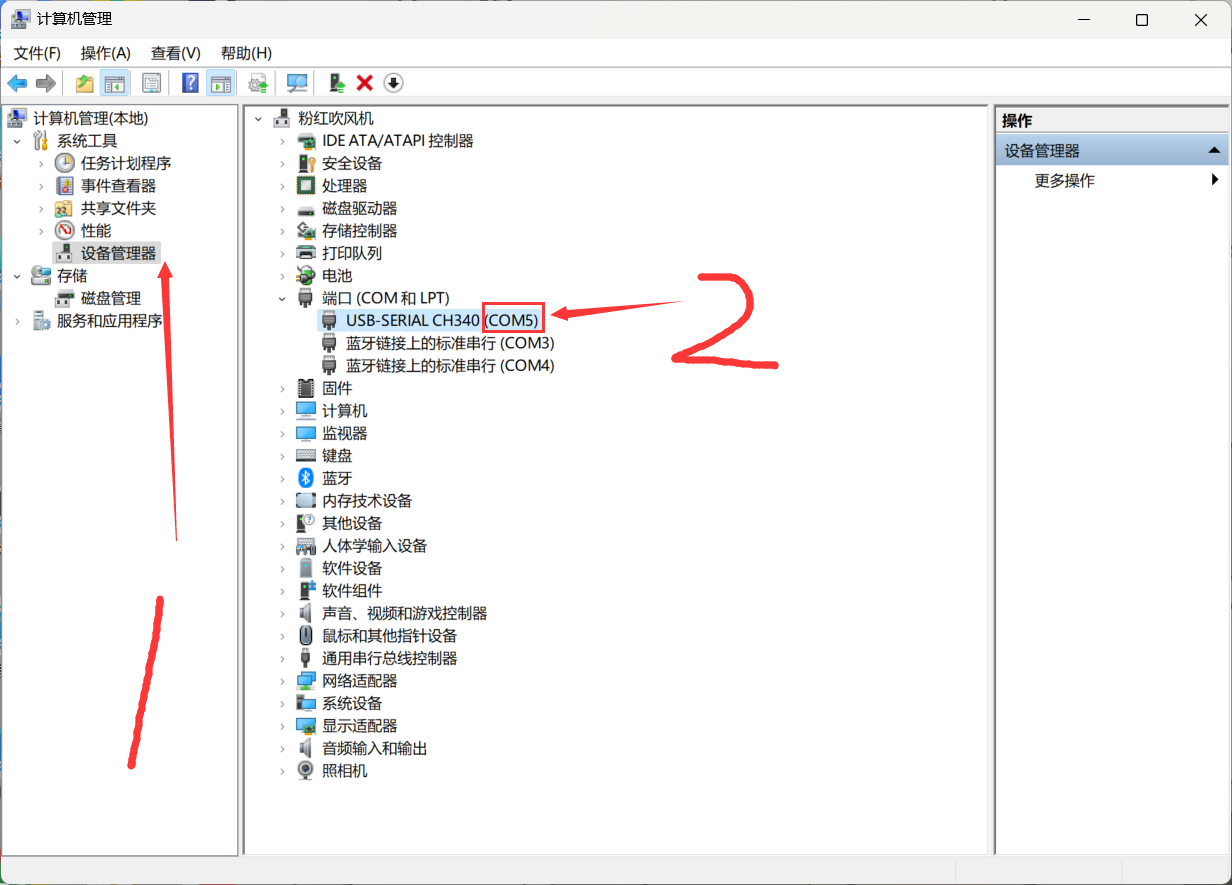
打开“设备管理器”查看并记录TTL板的端口号。

(建议录入指纹时,波特率选择57600)。
录入指纹完成后拔掉TTL板,使用杜邦线连接开发板指纹模块和舵机。
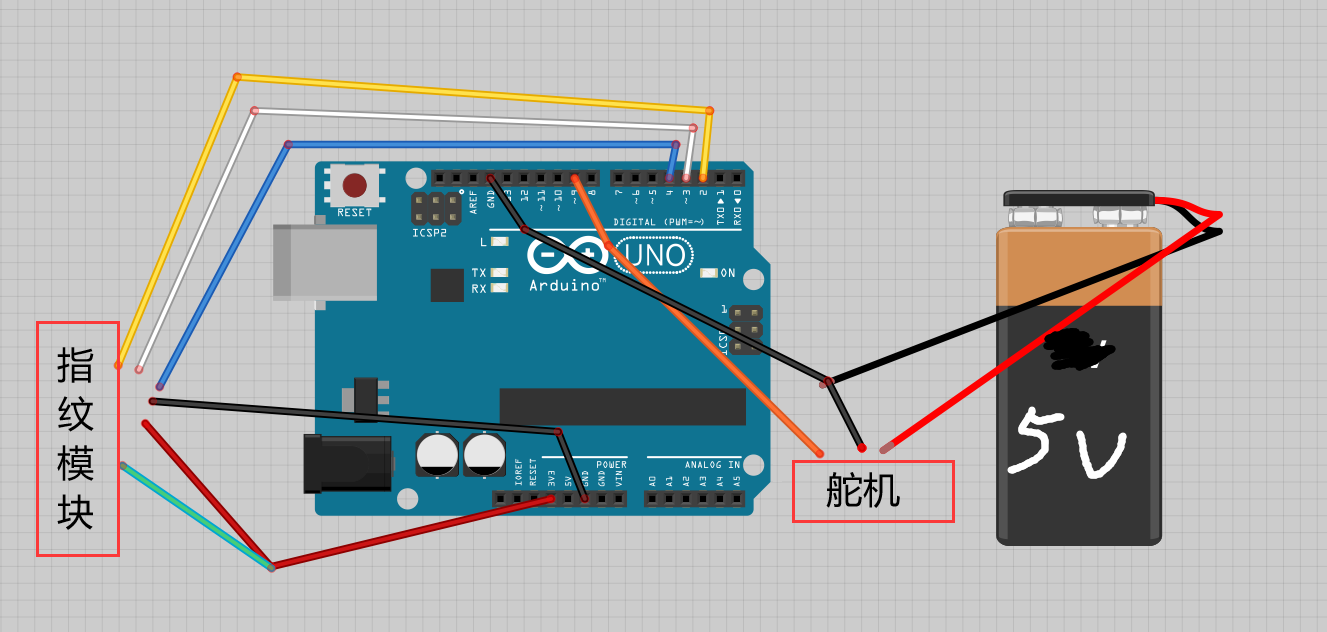
4、线路连接
准备红、黄、蓝、绿、白、黑、橙颜色合适长度的杜邦线若干。舵机上红色为电源线,棕黑色为地线,橙黄色为信号线。
1、指纹模块红色绿色线延长接成一根红色线上接R3板3.3V口。(供电)。
2、指纹模块黑色线接R3板GND接口(地线)。
3、指纹模块黄色线接R3板数字2号口(串行数据输出)。
4、指纹模块白色线接R3板数字3号口(串行数据输入)。
5、指纹模块蓝色线接R3板数字4号口(感应信号输出)。
6、舵机棕黑色线接R3板GND接口(地线)。
7、舵机红色接R3板5V接口(供电)。
8、舵机橙黄色线接R3板9号口(信号)。
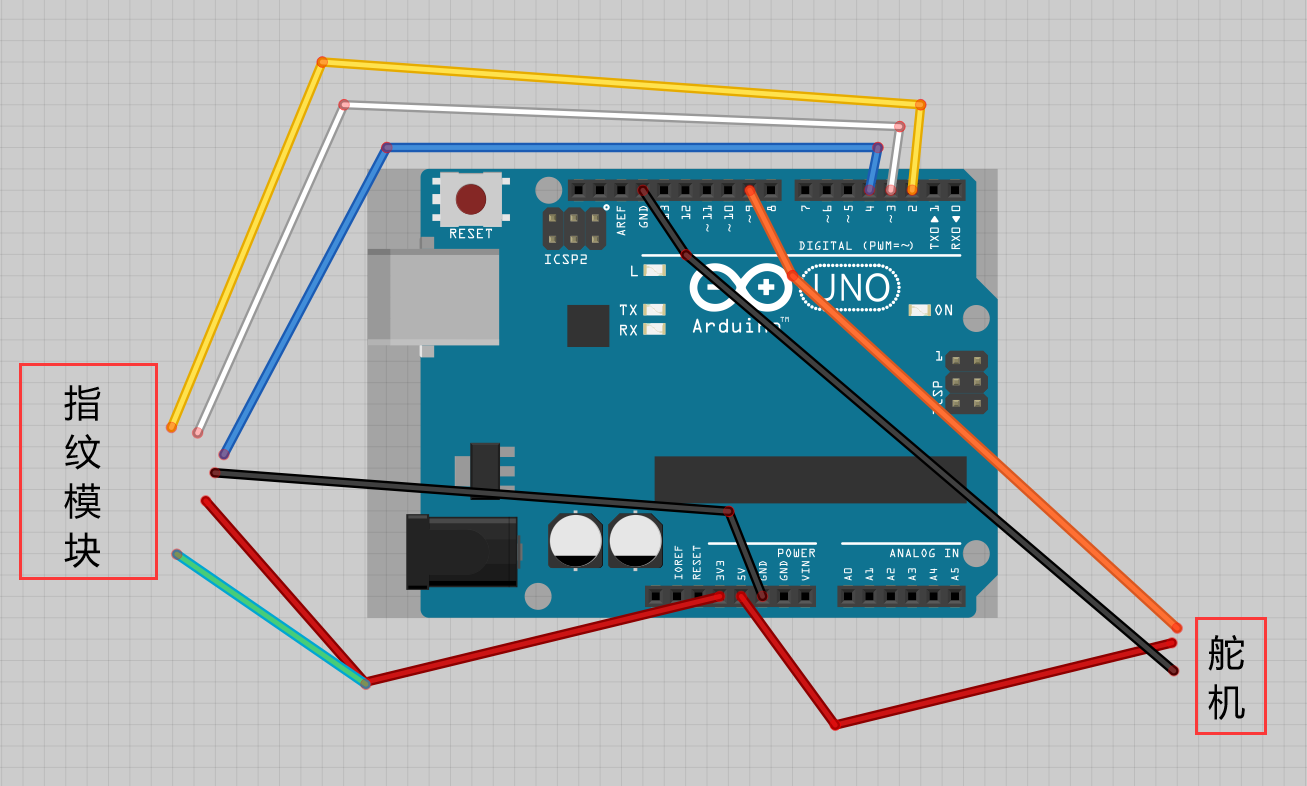
地线黑色接开发板GND和舵机黑色地线。(独立供电需要共地)。
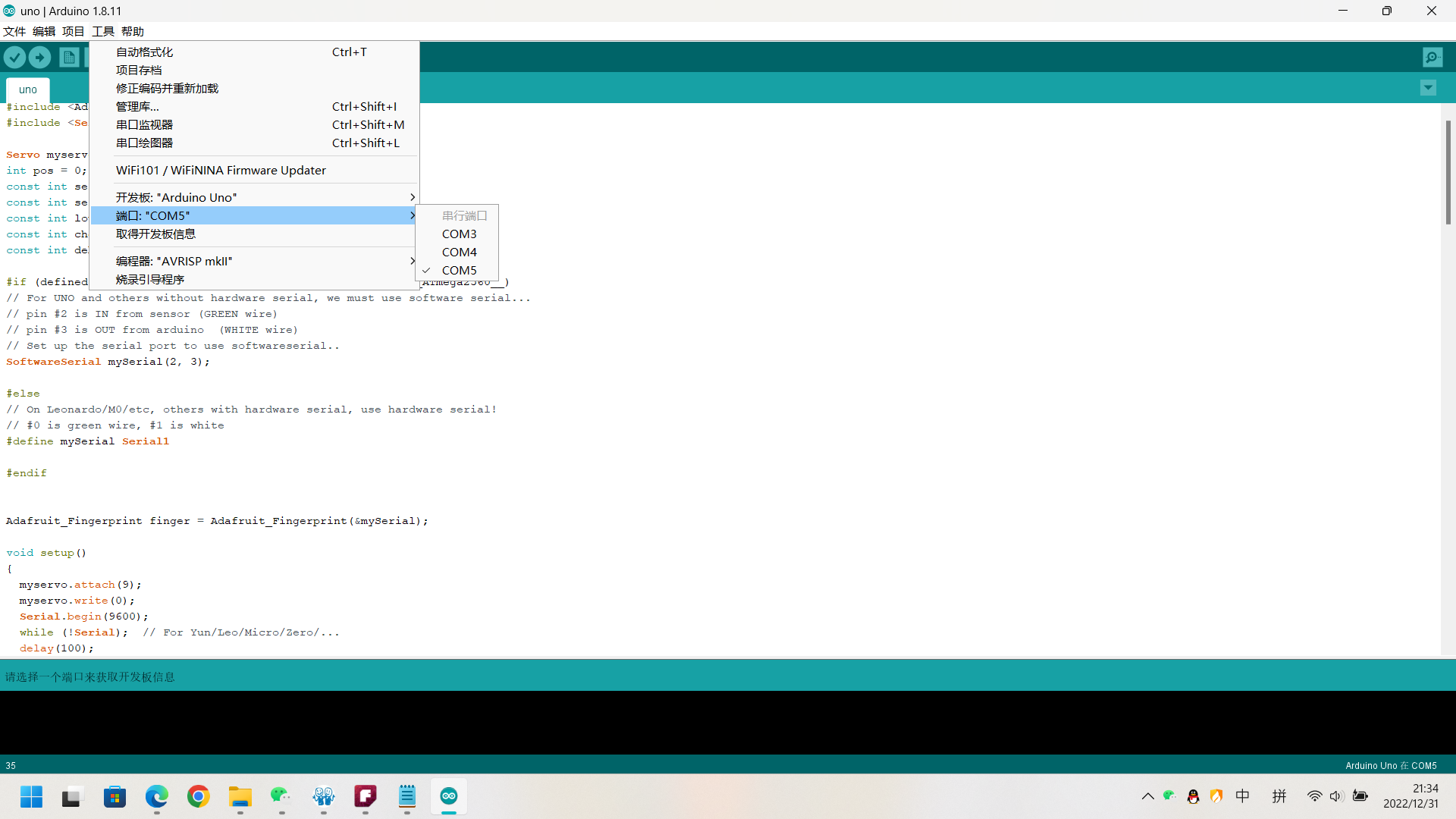
5、刷写程序
把R3板连接电脑,选择开发板的端口(工具→端口→选择端口),复制以下代码进Arduino程序。如果缺少库文件,就在“工具→管理库”里面搜索添加提示缺失的库即可
左上角√图标验证没问题,就可以上传至R3板内了。
第17行修改行数据输出和串行数据输入接口。
第31行修改舵机信号端口.
第39行设置指纹识别模块波特率速率。
79~86行修改舵机属性。 (源码来自https://www.arduino.cc/reference/en/libraries/)
#include <Adafruit_Fingerprint.h> //声明调用Adafruit_Fingerprint.h库 指纹
#include <Servo.h> // 声明调用Servo.h库 舵机
Servo myservo; // 创建一个舵机对象
int pos = 0; // 变量pos用来存储舵机位置
const int servoDelay = 15;
const int servoStop = 5000;
const int lowPowerRate = 1;
const int checkDelay = 1000;
const int debug = 0;
#if (defined(__AVR__) || defined(ESP8266)) && !defined(__AVR_ATmega2560__)
// For UNO and others without hardware serial, we must use software serial...
// pin #2 is IN from sensor (GREEN wire)
// pin #3 is OUT from arduino (WHITE wire)
// Set up the serial port to use softwareserial..
SoftwareSerial mySerial(2, 3);//黄色串行数据输出&&白色串行数据输入接口(可修改范围A0~A5,2~13)
#else
// On Leonardo/M0/etc, others with hardware serial, use hardware serial!
// #0 is green wire, #1 is white
#define mySerial Serial1
#endif
Adafruit_Fingerprint finger = Adafruit_Fingerprint(&mySerial);
void setup()
{
myservo.attach(9); //舵机信号端口(可修改范围A0~A5,2~13)
myservo.write(0);
Serial.begin(9600);
while (!Serial); // For Yun/Leo/Micro/Zero/...
delay(100);
Serial.println("\n\nAdafruit finger detect test");
// set the data rate for the sensor serial port
finger.begin(57600);//设置传感器串行端口的数据速率
delay(5);
if (finger.verifyPassword()) {
Serial.println("Found fingerprint sensor!");
} else {
Serial.println("Did not find fingerprint sensor :(");
while (1) { delay(1); }
}
Serial.println(F("Reading sensor parameters"));
finger.getParameters();
Serial.print(F("Status: 0x")); Serial.println(finger.status_reg, HEX);
Serial.print(F("Sys ID: 0x")); Serial.println(finger.system_id, HEX);
Serial.print(F("Capacity: ")); Serial.println(finger.capacity);
Serial.print(F("Security level: ")); Serial.println(finger.security_level);
Serial.print(F("Device address: ")); Serial.println(finger.device_addr, HEX);
Serial.print(F("Packet len: ")); Serial.println(finger.packet_len);
Serial.print(F("Baud rate: ")); Serial.println(finger.baud_rate);
finger.getTemplateCount();
if (finger.templateCount == 0) {
Serial.print("Sensor doesn't contain any fingerprint data. Please run the 'enroll' example.");
}
else {
Serial.println("Waiting for valid finger...");
Serial.print("Sensor contains "); Serial.print(finger.templateCount); Serial.println(" templates");
}
}
void loop() // run over and over again
{
Serial.println("Voltage in 4"); Serial.println(digitalRead(4));
if(!lowPowerRate || digitalRead(4) == HIGH) {
getFingerprintID();
}
delay(checkDelay); //don't ned to run this at full speed.
}
void openAndReset(){
for(pos = 0; pos < 180; pos += 1){ // 舵机从0°转到180°,每次增加1°
myservo.write(pos); // 给舵机写入角度
delay(servoDelay); // 延时15ms让舵机转到指定位置
}
delay(servoStop);
for(pos = 180; pos>=1; pos-=1) { // 舵机从180°转回到0°,每次减小1°
myservo.write(pos); // 写角度到舵机
delay(servoDelay); // 延时15ms让舵机转到指定位置
}
}
uint8_t getFingerprintID() {
uint8_t p = finger.getImage();
switch (p) {
case FINGERPRINT_OK:
Serial.println("Image taken");
break;
case FINGERPRINT_NOFINGER:
Serial.println("No finger detected");
return p;
case FINGERPRINT_PACKETRECIEVEERR:
Serial.println("Communication error");
return p;
case FINGERPRINT_IMAGEFAIL:
Serial.println("Imaging error");
return p;
default:
Serial.println("Unknown error");
return p;
}
// OK success!
p = finger.image2Tz();
switch (p) {
case FINGERPRINT_OK:
Serial.println("Image converted");
break;
case FINGERPRINT_IMAGEMESS:
Serial.println("Image too messy");
return p;
case FINGERPRINT_PACKETRECIEVEERR:
Serial.println("Communication error");
return p;
case FINGERPRINT_FEATUREFAIL:
Serial.println("Could not find fingerprint features");
return p;
case FINGERPRINT_INVALIDIMAGE:
Serial.println("Could not find fingerprint features");
return p;
default:
Serial.println("Unknown error");
return p;
}
// OK converted!
p = finger.fingerSearch();
if (p == FINGERPRINT_OK) {
Serial.println("Found a print match!");
} else if (p == FINGERPRINT_PACKETRECIEVEERR) {
Serial.println("Communication error");
return p;
} else if (p == FINGERPRINT_NOTFOUND) {
Serial.println("Did not find a match");
return p;
} else {
Serial.println("Unknown error");
return p;
}
// found a match!
Serial.print("Found ID #"); Serial.print(finger.fingerID);
Serial.print(" with confidence of "); Serial.println(finger.confidence);
openAndReset();
return finger.fingerID;
}
// returns -1 if failed, otherwise returns ID #
int getFingerprintIDez() {
uint8_t p = finger.getImage();
if (p != FINGERPRINT_OK) return -1;
p = finger.image2Tz();
if (p != FINGERPRINT_OK) return -1;
p = finger.fingerFastSearch();
if (p != FINGERPRINT_OK) return -1;
// found a match!
Serial.print("Found ID #"); Serial.print(finger.fingerID);
Serial.print(" with confidence of "); Serial.println(finger.confidence);
return finger.fingerID;
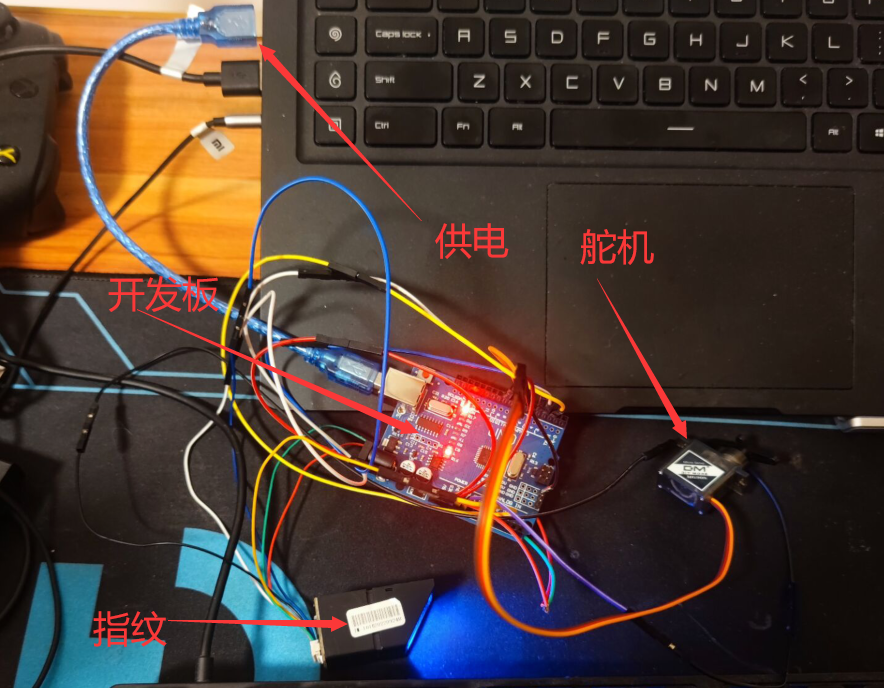
}6、安装调试
程序烧录进开发板,先测试能否正常使用。按指纹识别模块,舵机旋转就成功啦。请使用打印线供电,USB转DC(5.5*2.1给开发板供电舵机无力) 使用热熔胶或者AB胶将舵机固定在门上合适的位置。
要舵机开门力度不够就重新换个大力的舵机,设置方法一模一样就好。
Comments NOTHING